This research is part of a project involving the design of human-computer interfaces for collaborative spatial reasoning in 3D virtual workspaces. Previous research has shown that the relative orientation of familiar objects influences which reference frame is used when people produce a spatial description. Further, for familiar objects, it has been shown that relative stability affects reference object choice. We extend previous research by examining whether the same principles also influence the production of spatial descriptions of novel objects.
Give Away FREE Stuff and MAKE MONEY!
![]()
![]()
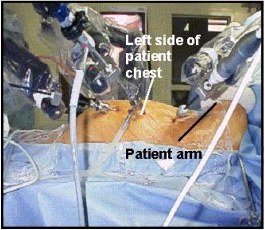
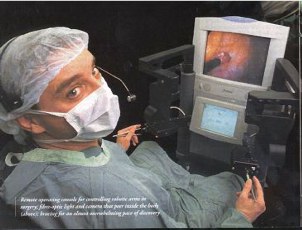
![]() I have been working on Robotics, haptic Control, 3-D Vision, Internet-based Telerobotics, VR and Image-guided Robotic Cardiac Surgery for more than 8 years.
I have been working on Robotics, haptic Control, 3-D Vision, Internet-based Telerobotics, VR and Image-guided Robotic Cardiac Surgery for more than 8 years.
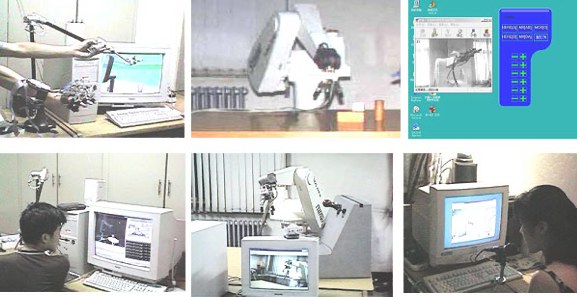
- My dissertation presents a deep and detailed study on Robotics and network-based telerobotics system. The researches on teleoperated architecture, multi-sensor integration/data fusion, communication propagation time-delay, predictive display and graphics overlay based on virtual reality, man-machine interaction control, and telerobotic experiments are deeply and systematically investigated.
- The worldwide research status of robotic teleoperation is discussed here. In terms of our research background and objectives, we studied the teleoperated architecture and related technologies, and proposed a task-oriented share control structure using hierarchical methods. It adopted module-based seven-layer structure, and perfectly combined high-level remote monitor/manipulation and low-level local autonomous control.
-
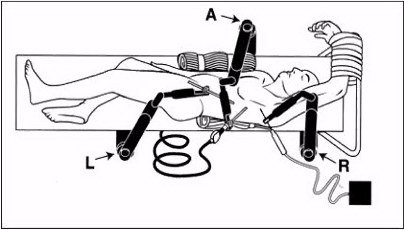
Multi-sensor integration and data fusion are very important difficulties in tele-autonomous robotic system with 15 Degree of Freedom. A task-based neural network fusion algorithm for multi-sensor integration and data fusion is introduced to real-timely get the perception result from multiple different sensors.
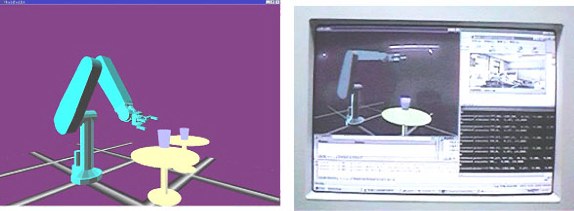
- Time delay is inevitable in teleoperated system via network, and it destroys system's stability and reliability. On the basis of great deal of INTERNET measures, we build a universal INTERNET time delay model, and introduce a predictive display and graphics overlay technology for virtual reality to remotely control robotic arm/hand system. As a result, the influence of time delay and packet loss is eliminated in our telerobotics system.
- Moreover, real-time interaction of a large amount of multimedia information is accomplished under China limited PSTN bandwidth. We also develop two-generation cheap teleoperated arm and data glove in the process of virtual reality interaction. They are used in our practical systems and show bright foreground in teleoperation, virtual assembly, telepresence and man-machine interactive control etc.
- Finally, on the basis of plentiful experimental researches, we set up an INTERNET-based teleoperated education system. The high-efficiency and reliability of telerobotics system are testified well in actual application. The principle and implementation of three typical telerobotic experiments are demonstrated and explained.

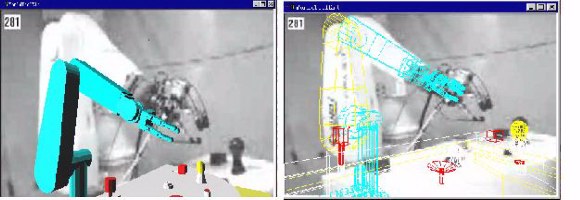

Today, haptic feedback is essential in many important virtual reality and telepresence applications. Such a system can accommodate a wide variety of virtual reality applications including training and telerobotics by using a vision-based, object-tracking technique and a video-keying technique. In other words, it is desirable that what you see is what you feel in haptic control system. To avoid position dependencies, force-based discrete states (contact formations) can be used to describe qualitatively how contact is being made with the environment. In the meanwhile, it can also provide realistic haptic sensations, such as free-to-touch and move-and-collide. So the user encounters the haptic device exactly when his or her hand reaches a virtual object in the display.


Last
Updated:
03/27/2001 03:38:53 PM